| Specification |
| 1. Robot body |
1.1 |
Six degree of freedom, tandem articulated industrial robot |
/ |
| 1.2 |
Repeatability |
±0.02mm |
| 1.3 |
Load capacity |
⩾3kg |
| 1.4 |
Horizontal reachable distance |
⩾571.5mm |
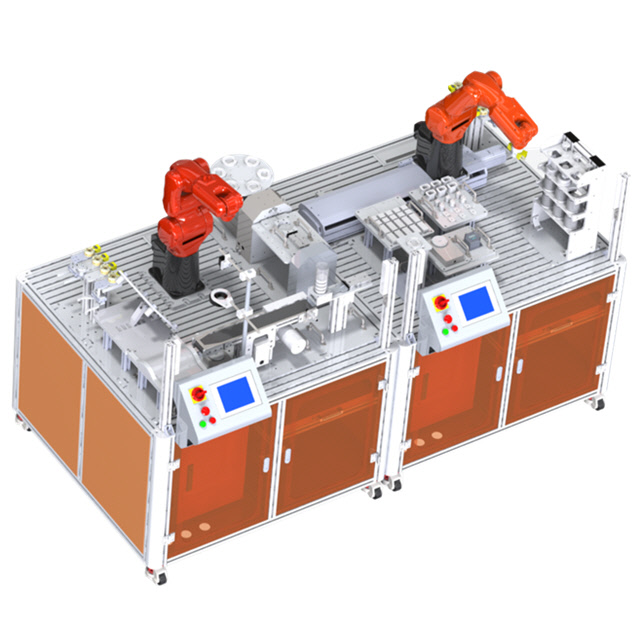
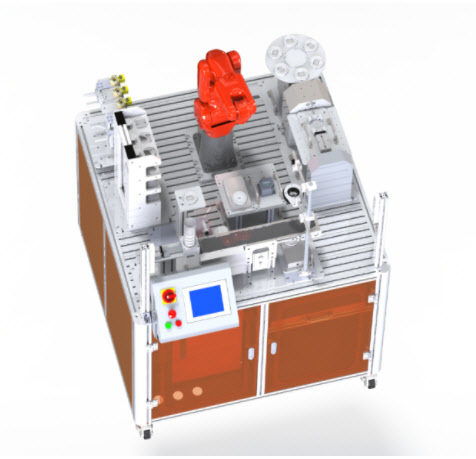
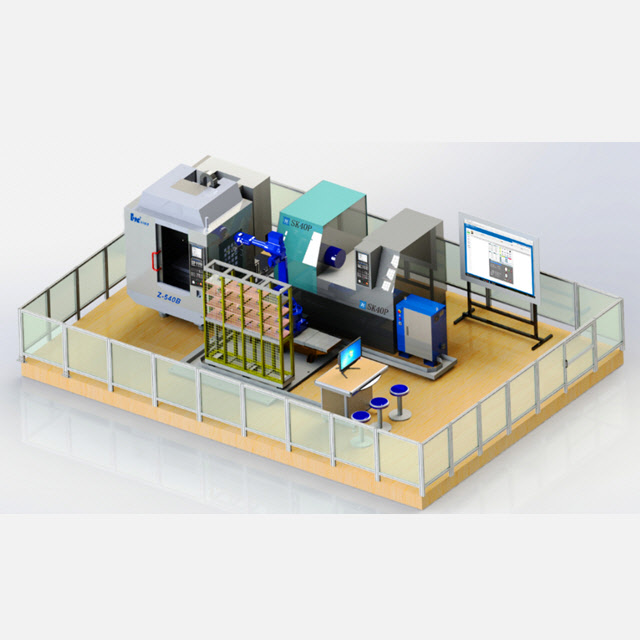
| 2. Standard training platform |
2.1 |
Size |
⩾1280 × 1280 × 880 mm |
| 2.2 |
Module fixing plate |
⩾12 |
| 2.3 |
Maximum electrical interface capacity |
⩾3 groups |
| 3. Quick change tool module |
3.1 |
1 set of fixed bottom plate |
/ |
| 3.2 |
1 set of quick-change bracket |
| 3.3 |
1 set of quick-change plate |
| 3.4 |
4 sets of tools and stainless steel handles |
| 4. Sample set
|
4.1 |
Assembly kit (base model, motor model, reducer model, flange model) |
The motor model is divided into three parts: motor housing, rotor and end cover |
| 4.2 |
Can be fully assembled or customized
assembly. |
/ |
| 4.3 |
Palletizing kit
Requirements: square and rectangular can be mixed |
Type of parts: ⩾2 types (square and rectangular) |
| 5. Drawing module |
5.1 |
Adapt to standard training platform positioning installation |
/ |
| 5.2 |
Number of drawings |
⩾10 |
| 5.3 |
Preset pattern |
Straight line, arc, curve |
| 5.4 |
Plane drawing board size |
290×223×2mm |
| Surface drawing module |
/ |
| 5.4.1. Adapt to standard training platform positioning installation |
| 5.4.2. Number of drawings |
⩾10 |
| 5.4.3. Preset pattern |
Straight line, arc, curve |
| 5.5 |
Surface drawing size |
250×200×35mm |
| 6. Handling module |
6.1 |
Number of parts that can be accommodated |
18 |
| 6.2 |
Arrangement form |
3 rows, 6 columns |
| 6.3 |
The workpiece to be handled is triangular, and the handling slot has a digital identification. |
/ |
| 7. Palletizing module |
7.1 |
Palletizing position |
⩾2 positions |
| 7.2 |
Pallet size |
65×65×25mm |
| 7.3 |
The robot has a palletizing technology package, which can quickly perform palletizing programming. |
/ |
| 8. General Electric Interface Kit |
8.1 |
Bus module |
Support Ethercat or DeviceNet |
| 8.2 |
Digital expansion module |
1)Digital channel: 32DI/DO
2)Voltage: DC24V |
| 9. Peripheral Controller Kit |
9.1 |
Controller |
Memory capacity for users: ⩾100K/4MB. |
| Digital channel: ⩾14DI/10DO |
| Analog channel: ⩾2AI/AO |
| AI(0-10v) AO(0-20mA) |
| 9.2 |
HMI |
Display: ⩾7 inches TFT display, 16777216 colors |
| Resolution: ⩾800×480 pixels |
| 10. Assembly module |
10.1 |
Contains double shaft cylinder |
/ |
| 10.2 |
V-block fixed clamping range is variable |
| 10.3 |
Installation method: installed above the rotary positioner module controlled by the servo motor |
| 11. # type feeding module |
11.1 |
Plexiglas tube length |
⩾150mm |
| 11.2 |
Use cylinder mode to control the discharge of materials |
/ |
| 12. Conveyor transport module |
12.1 |
Conveyor included |
| 12.2 |
Effective working width |
⩾60mm |
| 12.3 |
Max. speed |
⩾4m/min |
| 12.4 |
Support 0-20mA analog speed control |
/ |
| 13. RFID module |
13.1 |
Contains reader’s support part |
| 13.2 |
Communication Interface |
RS422 |
| 13.3 |
Reader |
Operating frequency/ rated value: 13.56MHz |
| 14. Visual inspection module |
14.1 |
Visual inspection system |
1/1.8″ CMOS imager: color, 6 million pixels |
| Imaging mode: ⩾640×480 |
| Resolution: 3072×2048 |
| Frame rate: 17fps |
| 14.2 |
Weighing unit |
Weighing area: ≤φ68mm |
| Weighing range: 0-1000g |
| 15. Storage module |
15.1 |
Storage capacity |
⩾6 |
| 15.2 |
Compatible workpiece types |
⩾4 types |
| 15.3 |
Ethernet I/O acquisition module |
Data acquisition channel: ⩾6DI |
| 16. Rotary feeding module |
16.1 |
Speed |
⩾20º/s |
| 16.2 |
Load |
⩾5kg |
| 16.3 |
Drive |
Stepper motor +
harmonic reducer |
| 17. Positioner module |
17.1 |
Travel range |
±45° |
| 17.2 |
Speed range |
10~30°/s |
| 17.3 |
Drive method |
AC servo + worm gear reducer |
| 18. Typical process application module kit |
18.1 |
Including welding, grinding, gluing, various types of process for workpieces ⩾2 |
/ |
| 19. Motor assembly module |
19.1 |
Material pallet size (length * width) |
300×250mm |
| 20. Checkerboard module |
20.1 |
Board size |
300×300×8mm |
| 20.2 |
Chess piece array |
5×5 |
| 20.3 |
Can accommodate chess pieces size |
φ55mm |
| 21. Material temporary storage module |
21.1 |
Placement height |
Vertical distance from desktop 150mm |
| 21.2 |
Can accommodate positioning workpiece types |
⩾2 |
| 22. Offline programming software |
22.1 |
Genuine software, exclusive license, free upgrade |
/ |
| 22.2 |
The offline programming software and the training platform industrial robot body are the same brand. |
| 22.3 |
It can realize offline programming of more than 3 brands and more than 3 models of industrial robots of each brand; |
| 23. Secondary development software package |
23.1 |
Support the secondary development for the industrial robot system |
| 23.2 |
Support SDK for secondary development programming of industrial robot system |
| 23.3 |
Support the customization of the teach pendant interface |
| 23.4 |
Provide controller configuration software |
1) Can realize the communication connection with the robot controller;
2) Provide basic teaching of the robot, including jog, inching, reset alarm functions, etc. |
| 24. Oil-free silent air pump |
24.1 |
Using pure copper motor to provide air supply for the innovation platform |
Equipment power: 600W
Displacement: 45L/min
Capacity: 30L |
| 25. Computer, desk and chairs |
|
|
/ |
| 26. Process monitoring module |
|
Used for video recording during training and assessment, to monitor the operation of equipment. |
| 26.1 |
Camera hardware configuration |
1) The highest resolution is up to 1920×1080 @25fps
2) Support PoE power supply function |
| 26.2 |
U-shaped camera bracket |
Made of high-quality steel pipe, the bottom can be perfectly docked with the platform, and network communication cables can be installed inside |